Researchers have designed a system that allows robots to record the highest jumps ever recorded.
A team from the University of Manchester has developed a design that allows robots to overcome obstacles many times their size. They used a combination of computer simulations, laboratory experiments and mathematical principles.
The system helped the team optimize the size, shape and arrangement of the robot’s parts and achieve the desired results.
According to researchers, the current highest-jumping robot can reach up to 33 meters, which is 110 times its own size. The new robot can jump more than 400 feet in the air or 650 feet on the moon – more than twice the height of Big Ben’s tower.
The details of the team’s research have been published in the journal Mechanism and machine theoryj.
Efficient robot jumps
Traditionally, robots are designed to move by rolling on wheels or walking on legs. However, jumping is an effective way to navigate locations with uneven terrain or numerous obstacles.
Although there are jumping robots on the market today, their design presents a number of significant hurdles, the most important of which is the ability to jump high enough to overcome substantial and complicated barriers.
The team aimed to find a design that would “dramatically improve the energy efficiency and performance of spring-powered jumping robots,” says Dr. John Lo, Research Associate in Space Robotics at the University of Manchester and co-author of the study, said in a statement.
The researchers found that conventional jumping robots often launch themselves before fully releasing the collected spring energy, which limits their maximum height and produces inefficient jumps. In addition, they tend to waste energy by turning or moving sideways instead of jumping straight up.
The researchers sought to eliminate these unwanted movements with their new designs while maintaining the necessary stiffness and structural integrity.
Optimization of the jump dynamics
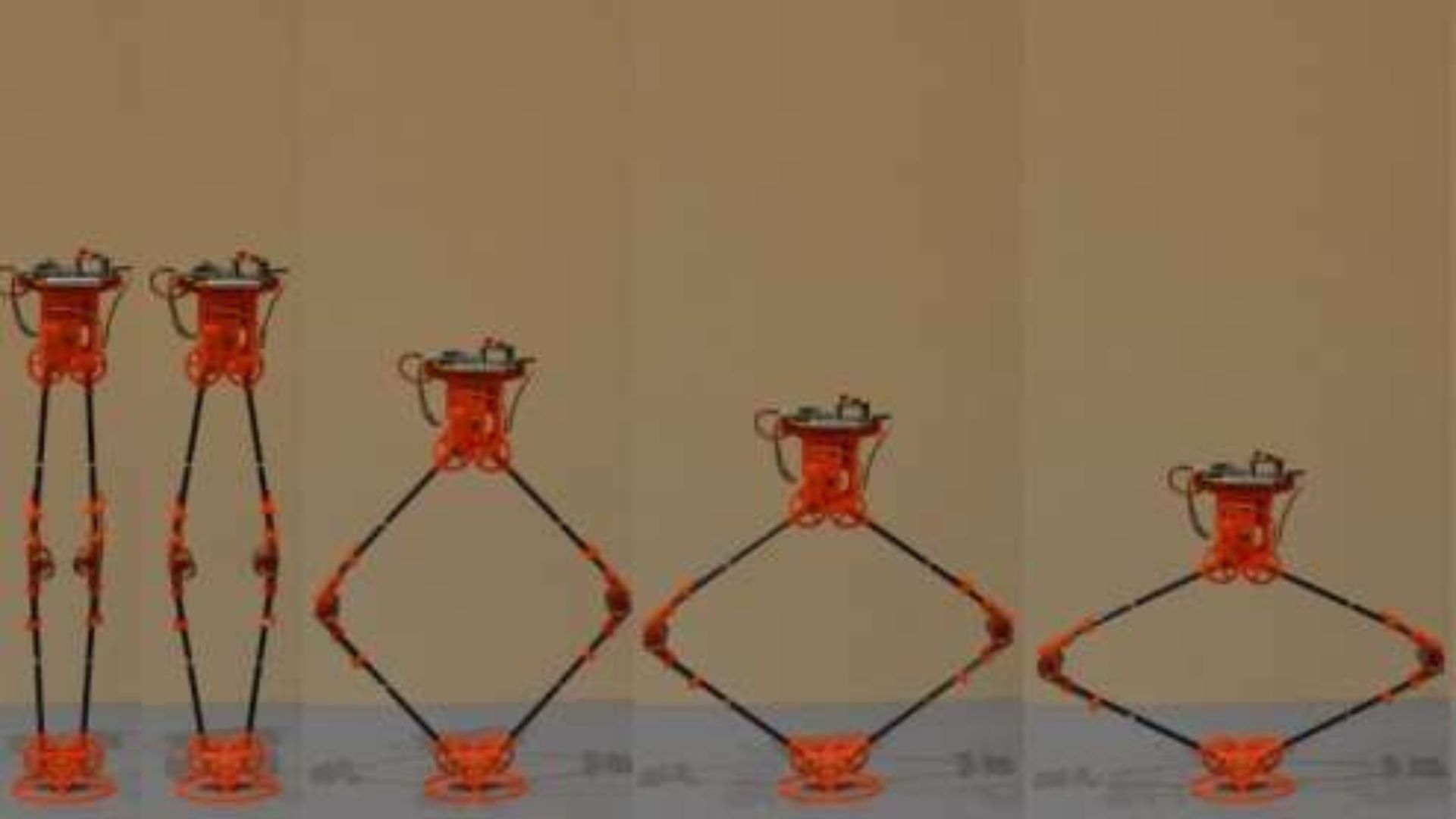
The team studied how prismatic and rotary, spring-driven models jump and used this information to create a multibody model of a rhombic linkage for a physical jumping system.
According to the team, deciding on the shape of the robot involves choosing between leg-based propulsion, similar to a kangaroo, or a piston-like mechanism with a large spring.
Shape options range from simple symmetrical designs like diamonds to more complex, organic shapes. The team then had to decide on the size of the robot: small ones are agile, while larger ones can house stronger motors for higher jumps. Finding the optimal size likely means finding a balance between agility and strength.
The team’s design improvement includes redistributing mass to the top and optimizing link structures, although these improvements must be tailored to each design.
“Lighter legs, in the form of a prism, and the use of springs that only stretch are all features that we have shown to improve the performance and, more importantly, the energy efficiency of the jumping robot,” said Dr. Ben Parslew, senior lecturer in Aerospace Engineering at the university and co-author of the study.
While the researchers have identified a viable design alternative to significantly improve performance, their next step is to control the direction of the jumps and determine how the kinetic energy of the landing can be used to increase the number of jumps the robot can perform with can carry out one load.
Researchers say they will also explore smaller versions for space missions.
ABOUT THE EDITORIAL
Jijo Malayil Jijo is an automotive and business journalist based in India. Armed with a BA in History (Honors) from St. Stephen’s College, University of Delhi, and a PG degree in Journalism from the Indian Institute of Mass Communication, Delhi, he has worked for news agencies, national newspapers and motoring magazines. In his spare time he enjoys going off-road, engaging in political discussions, traveling and teaching languages.